
RPi CM4 SPI 轉 CAN Bus MCP251xFD 的使用 打通 CAN Bus 自檢
前言
本篇內容將base on RPi CM4來帶各位一步一步瞭解硬體驗證的流程與步驟,主要針對SPI與CAN Bus MCP251xFD 的啟用。
前提準備
在啟用CAN Bus之前我們要先把RPi架設好環境,請參考這篇文章->Base on RPi CM4 開發板 硬體驗證流程 教學 步驟 硬體驗證工程師 BSP工程師<-
CAN BUS打通的方法
請先看硬體電路圖來確認CAN BUS的接線與使用到的compoment有哪些,確認後知道有使用了一顆SPI轉CAN BUS的晶片叫MCP251xFD,然後這邊我也確認過Linux Kernel Option(CONFIG_CAN_MCP251XFD)有開啟了,再來就是RPi這邊要啟用SPI interface,一樣進入到/boot/config.txt檔內,新增底下語法
dtparam=spi=on
或是下達底下指令
$ sudo raspi-config
然後選擇3 Interface Options再選擇I4 SPI,選擇Yes Enable SPI。
兩個方法二擇一,設定完成後都要重新開機。
重新開機後我們下達指令,正常來說會出現底下訊息
$ ls /dev/*spi*
/dev/spidev0.0 /dev/spidev0.1
但因為我剛剛前面再這篇文章開通USB時已經把SPI0的function換成了UART3、UART4,所以我這邊沒有看到。
而從電路圖上看SPI轉CAN Bus的晶片腳位,可以知道SPI使用的是CM4的SPI1_CE0_N(SPI1 chip select(Enable) 0),而我們在看到下面這張圖
!!補充: SPI1表示bus 1,CE0=chip enable 0,又稱CS0=chip select 0。

找到SP1和SPI1_CE0的腳位,在GPIO18~GPIO21的ALT4,一樣接下來我們要修改/boot/config.txt來使GPIO18~21腳位功能定義為SPI1。
一樣我們先找尋設定SPI有哪些參數如下指令。
$ dtoverlay -a |grep spi
anyspi
enc28j60-spi2
jedec-spi-nor
mipi-dbi-spi
sc16is752-spi0
sc16is752-spi1
sh1106-spi
si446x-spi0
spi-gpio35-39
spi-gpio40-45
spi-rtc
spi0-0cs
spi0-1cs
spi0-2cs
spi1-1cs
spi1-2cs
spi1-3cs
spi2-1cs
spi2-2cs
spi2-3cs
spi3-1cs
spi3-2cs
spi4-1cs
spi4-2cs
spi5-1cs
spi5-2cs
spi6-1cs
spi6-2cs
ssd1306-spi
ssd1331-spi
ssd1351-spi
我們再下達該指令來繳解spi1-1cs與spi1-2cs的定義與差異
$ dtoverlay -h spi1-1cs
Name: spi1-1cs
Info: Enables spi1 with a single chip select (CS) line and associated spidev
dev node. The gpio pin number for the CS line and spidev device node
creation are configurable.
N.B.: spi1 is only accessible on devices with a 40pin header, eg:
A+, B+, Zero and PI2 B; as well as the Compute Module.
Usage: dtoverlay=spi1-1cs,<param>=<val>
Params: cs0_pin GPIO pin for CS0 (default 18 - BCM SPI1_CE0).
cs0_spidev Set to 'disabled' to stop the creation of a
userspace device node /dev/spidev1.0 (default
is 'okay' or enabled).
$ dtoverlay -h spi1-2cs
Name: spi1-2cs
Info: Enables spi1 with two chip select (CS) lines and associated spidev
dev nodes. The gpio pin numbers for the CS lines and spidev device node
creation are configurable.
N.B.: spi1 is only accessible on devices with a 40pin header, eg:
A+, B+, Zero and PI2 B; as well as the Compute Module.
Usage: dtoverlay=spi1-2cs,<param>=<val>
Params: cs0_pin GPIO pin for CS0 (default 18 - BCM SPI1_CE0).
cs1_pin GPIO pin for CS1 (default 17 - BCM SPI1_CE1).
cs0_spidev Set to 'disabled' to stop the creation of a
userspace device node /dev/spidev1.0 (default
is 'okay' or enabled).
cs1_spidev Set to 'disabled' to stop the creation of a
userspace device node /dev/spidev1.1 (default
is 'okay' or enabled).
從原文我們可以得知,spi1-1cs這表代表sp1 bus, 開啟使用1個chip select,所以params只有cs0_pin可以使用,而spi1-2cs則代表sp1 bus, 開啟使用2個chip select分別是cs0與cs1,所以params就有cs0_pin與cs1_pin來設定他們的GPIO腳位。
瞭解之後我們開啟/boot/config.txt,寫入以下內容開啟功能
# Change SPI Chip Select Pin
dtoverlay=spi1-1cs,cs0_pin=18
上面的意思表示開啟spi1 bus並使用一個cs,唯一的cs0他的pin腳位是用GPIO18(這邊端看電路圖怎麼接線的)
重新開機再用底下指令確認是否有抓到spi1
$ ls /dev/*spi*
ref: Raspberry Pi SPI and I2C Tutorial
接下來因為我們有用到SPI轉CAN Bus的晶片MCP251xFD,所以我們也來確認RPi的overlap是否有做好dtb。請輸入以下指令。
$ dtoverlay -a | grep mcp251
mcp2515
mcp2515-can0
mcp2515-can1
mcp251xfd
在輸入以下指令確認參數
$ dtoverlay -h mcp251xfd
Name: mcp251xfd
Info: Configures the MCP251XFD CAN controller family
For devices on spi1 or spi2, the interfaces should be enabled
with one of the spi1-1/2/3cs and/or spi2-1/2/3cs overlays.
Usage: dtoverlay=mcp251xfd,<param>=<val>
Params: spi<n>-<m> Configure device at spi<n>, cs<m>
(boolean, required)
oscillator Clock frequency for the CAN controller (Hz)
speed Maximum SPI frequence (Hz)
interrupt GPIO for interrupt signal
rx_interrupt GPIO for RX interrupt signal (nINT1) (optional)
xceiver_enable GPIO for CAN transceiver enable (optional)
xceiver_active_high specifiy if CAN transceiver enable pin is
active high (optional, default: active low)
我們看到interrupt為GPIO interrupt的腳位,這時候就要去確認電路圖中CAN BUS interrupt的腳位是接到GPIO的腳位幾~這邊我是接到GPIO 25。 而oscillator的設定可以參考mcp251xfd的datasheet如下圖所示。
oscillator有40, 20, 4 MHz可以選擇。
這時候再去確認你的hardware電路圖是用幾MHz的石英振盪器。2023/07/04補充。
在來的spi參數是要看SPI轉CAN Bus,是用到哪一個SPI Bus跟哪一個chip select,這邊我們是用SPI1 CS0所以參數就是spi1-0。 接下來到/boot/config.txt檔內加入底下設定。
# ENABLE SPI to CAN FD controller
dtoverlay=mcp251xfd,spi1-0,oscillator=20000000,interrupt=25
重新開機確認是否有出現can bus interface。下面看到can0即是。
$ ip a
1: lo: <LOOPBACK,UP,LOWER_UP> mtu 65536 qdisc noqueue state UNKNOWN group default qlen 1000
link/loopback 00:00:00:00:00:00 brd 00:00:00:00:00:00
inet 127.0.0.1/8 scope host lo
valid_lft forever preferred_lft forever
inet6 ::1/128 scope host
valid_lft forever preferred_lft forever
2: eth0: <NO-CARRIER,BROADCAST,MULTICAST,UP> mtu 1500 qdisc mq state DOWN group default qlen 1000
link/ether e4:5f:01:62:78:fd brd ff:ff:ff:ff:ff:ff
3: can0: <NOARP,ECHO> mtu 16 qdisc noop state DOWN group default qlen 10
link/can
4: wlan0: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc pfifo_fast state UP group default qlen 1000
link/ether e4:5f:01:62:78:fe brd ff:ff:ff:ff:ff:ff
inet 192.168.84.28/24 brd 192.168.84.255 scope global dynamic noprefixroute wlan0
valid_lft 3327sec preferred_lft 2877sec
inet6 2401:e180:8832:ed70:6501:e74c:bed:64e2/64 scope global dynamic mngtmpaddr noprefixroute
valid_lft 6927sec preferred_lft 6927sec
inet6 fe80::2fce:86be:72a2:de91/64 scope link
valid_lft forever preferred_lft forever
ref:
whats the difference between /dev/spidev0.0 and /dev/spidev0.1
CAN BUS 自我檢測方式
測試之前不了解CAN Bus可以先參考此連結。
測試的方式可以先看你有幾個CAN Bus,如果只有一組CAN Bus可以用loop back的測試方式,內部會直接Tx接Rx,也就是H、L相接。如果有兩組CAN Bus就H接H,L接L來互傳資料,要注意的是Tx與Rx都一定要接上線路讓他輸出與接收,不然就是使用loopback讓他內部晶片傳送資料,否則會出現Bus-off的state暫時斷東訊。我們看底下突來簡單解釋。
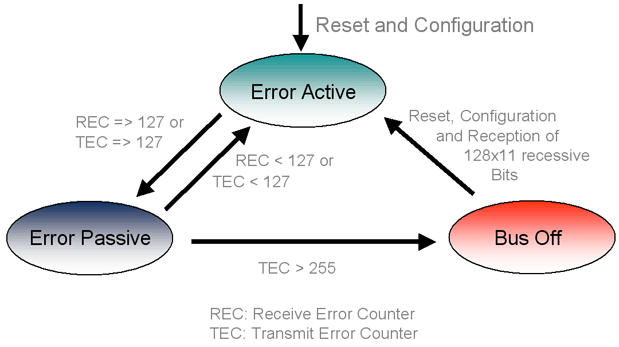
上圖說明REC=Receive Error Counter,TEC=Transmit Error Counter,如果資料傳送不出去counter超過255,則會到Bus-off狀態,反之REC亦然。
那我這邊先說明只有一組CAN Bus的自檢方式。請先把CAN Bus上的H與L短路。接下來輸入以下指令。 啟用can 0並開啟loopback模式
$ sudo ip link set can0 down
$ sudo ip link set can0 type can loopback on
$ sudo ip link set can0 up type can bitrate 1000000
先運行can dump在背景等待接收傳送資料。
$ candump can0&
傳送資料出去會收到以下訊息
$ cansend can0 001#1122334455667788
can0 001 [8] 11 22 33 44 55 66 77 88
can0 001 [8] 11 22 33 44 55 66 77 88
關閉can 0與loopback模式
$ sudo ip link set can0 down
$ sudo ip link set can0 type can loopback off
$ sudo ip link set can0 up type can bitrate 1000000
ref: CAN Bus in Linux
結語
硬體驗證就是這麼簡單有趣~
留言